Electronics¶
We have significant overlap with SENAC training. If you want more details on SENAC components you can go through their Electronics presentation. Here, we will cover the parts relevant to programming.
Operator Console and Communication¶
- We use a computer, joysticks, xbox controllers, etc
- We have one driver who operates the drivetrain, and another "manipulator" who controls all the other subsystems

- The RoboRIO is the "brain" of the robot and runs our robot code.
- Can plug sensors and add-ons onto it
- Can add micro-controllers such as a Raspberry Pi to connect to other devices

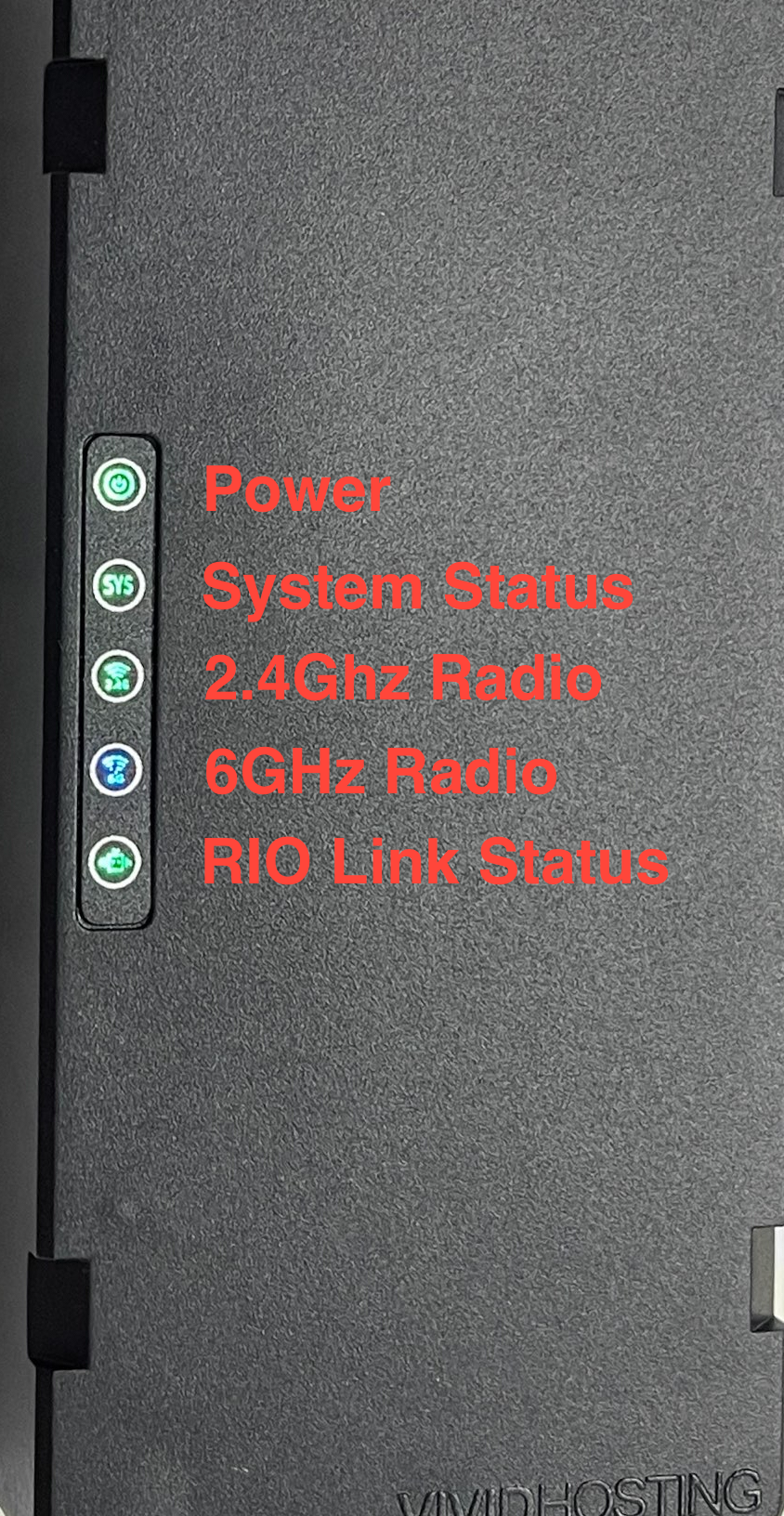
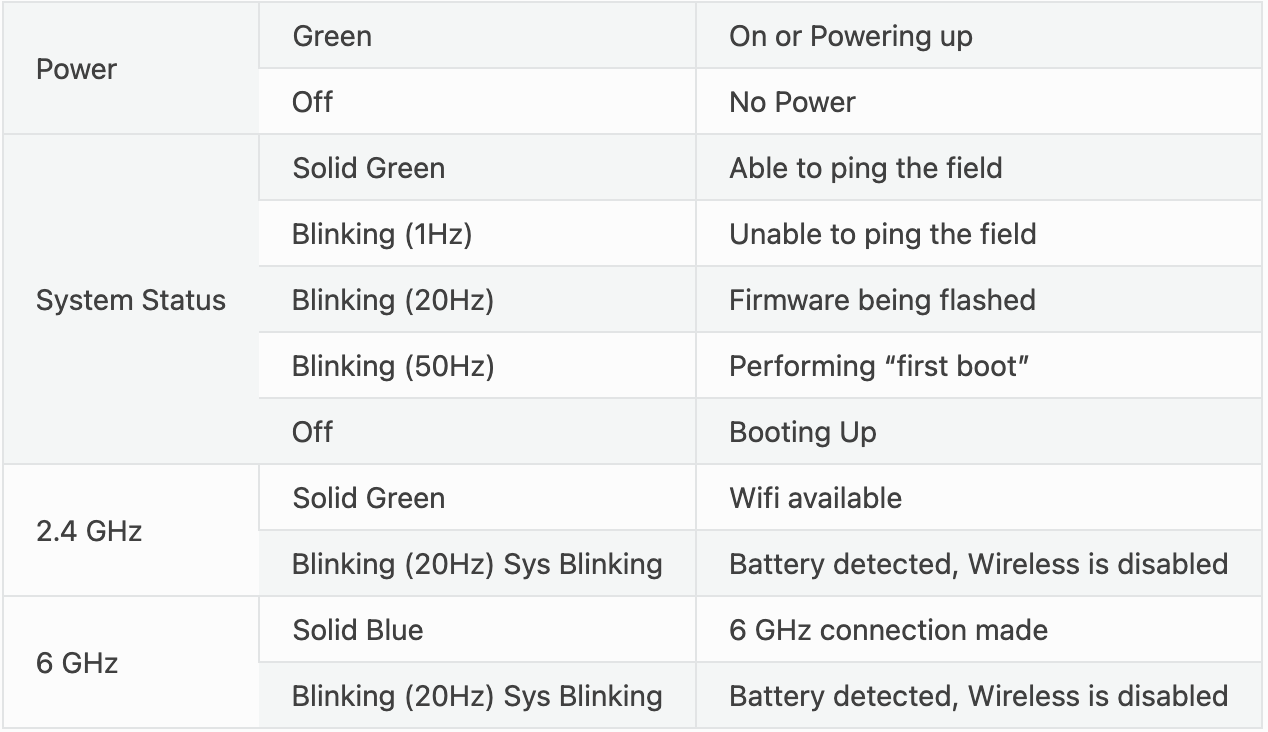
- The radio is what we use to communicate between the robot and the driverstation computer.
- Connects to the DS Computer via Wifi, Ethernet, or USB
- The Power Distribution Panel (PDP) / Power Distribution Hub (PDH) gives power to the electrical components.
Motors and Motor Controllers¶
- Motor controllers control the motors and communicate with the RoboRIO.
- The code only controls the motor controllers, which then control the motors. (Code does not control motors directly)
- Different types of motors have different power and respective motor controllers
- Gears and planetary gearboxes can be used to make the motor turn with more torque or turn faster
- The motors we use are:
- NEO
- We mostly use these
- Versatile
- Used for drivetrains and other subsystems which require a lot of torque
- NEO Vortex
- Very similar to normal NEOs
- Motor controller attaches directly to the motor instead of using cables
- NEO 550
- We usually don't use these
- Small
- Used for subsystems other than drivetrains
- NEO
- The motor controllers we typically use are:
- SparkMaxes
- SparkFlexes
Note
All brushless motors have built-in encoders.

Sensors¶
- Encoders
- Attached to motor or built into motor
- Record how much a motor has spun or its position
- Can find RPM, distance spun, etc
- navX
- Measures the angle turned for the robot
- Limelight
- Vision Tracking System
- Tracks retroreflective tape
- More details in the advanced programming section